כיום, לרוב המפעילים בשוק יש שני סוגים של שיטות בקרת כוח:
1. בקרת כוח לולאה נוכחית
שיטת בקרת כוח קונבנציונלית קלה יחסית ליישום, המיישמת בקרת כוח על ידי התאמת הזרם הפנימי של המנוע.היתרון הוא שהוא פחות קשה ליישום, והוא יכול להשיג שליטה בכוח בטווח של 5%-15% דיוק;החיסרון הוא שמהירות התנועה איטית, לא ניתן להניע אותה לאחור, והיא לא יכולה לענות על הצרכים של תרחישים מסוימים עם דרישות דיוק גבוהות יותר.לאחר תקופת שימוש, בלאי מכני יביא לשגיאות ויפחית עוד יותר את הדיוק.
למפעילים כאלה אין בדרך כלל חיישנים, וגם אם יש חיישנים, הם משמשים רק כ"תצוגות" של כוח ואינם משתתפים בשליטה.לדוגמה, הוספת חיישן למכבש, החיישן קורא את גודל הכוח, ומציג את הערך דרך המד, המשמש לסייע בהתאמה ידנית של גודל הכוח, אך להתאמה כזו אין בדרך כלל שום קשר עם דיוק הכוח.

דיאגרמה סכמטית, לא קשורה לגרפיקה ולטקסט
2. בקרת כוח חיישן בלולאה סגורה
שיטת בקרת כוח נוספת היא הוספת חיישן כוח קונבנציונלי ואלגוריתם בקרת מעגל סגור קונבנציונלי.היתרון הוא שהדיוק משופר, אבל החיסרון הוא שהמהירות עדיין איטית.בדרך זו, ניתן להגדיל את דיוק בקרת הכוח מ-5% ל-1%.אם אין עיבוד אלגוריתם נכון, או שמהירות החיישן אינה מהירה מספיק, הוא נוטה ל"חריג יתר על המידה".
מפעיל מבוקר בכוח
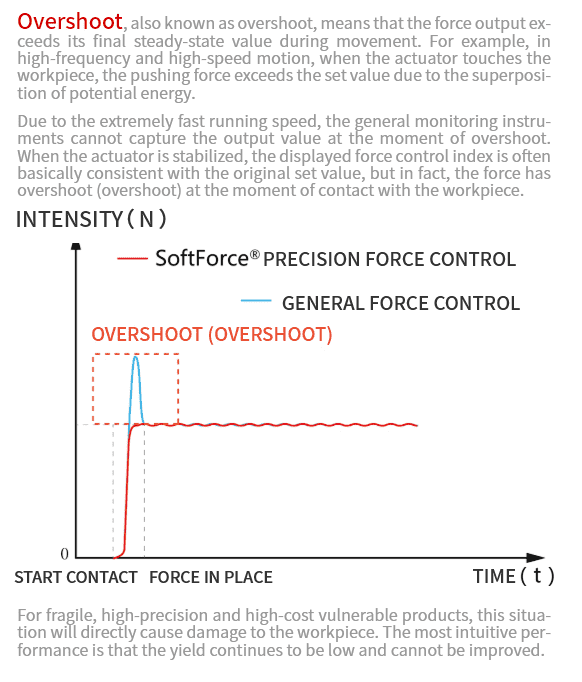
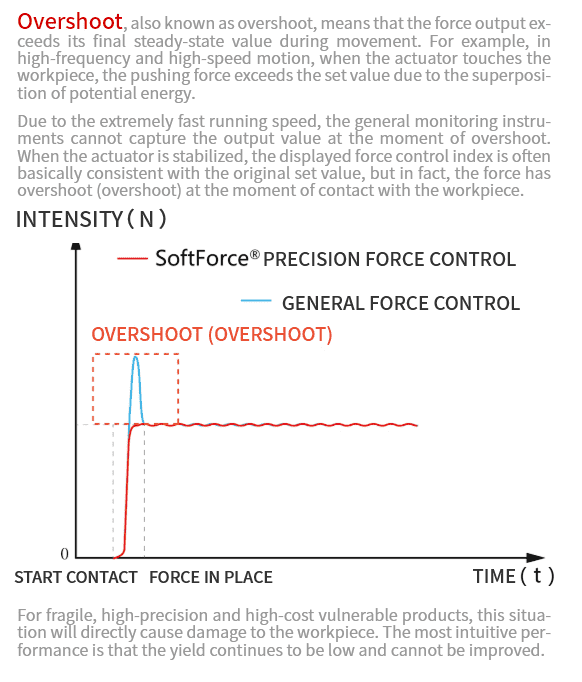
ה"חריגה" הבלתי נמנעת?
קשה להתמודד עם שיטת בקרת הכוח בלולאה סגורה של החיישן עם כוח הפגיעה.הביטוי הישיר ביותר הוא שקל מאוד להתרחש כשעוסקים בסצנות עם דרישות קצב גבוה.
לדוגמה
בדרך כלל, במקרה של מהירות גבוהה ותפוקה גדולה, הרגע שבו המפעיל יוצר קשר עם חלק העבודה הוא לרוב גדול במיוחד.לדוגמה, אם כוח הדחיפה של המפעיל מוגדר ל-10N, קל להגיע ל-11N ו-12N כאשר הוא נוגע בחומר העבודה, ואז הוא נקרא בחזרה ל-10N באמצעות אלגוריתם הבקרה.בעיות כאלה מתרחשות לעיתים קרובות כאשר מתווספים לשוק חיישני כוח ומה שנקרא מפעילי כוח מבוקרים.
זו הבעיה שמהירות התגובה אינה מהירה מספיק.מהירות גבוהה ופלט מדויק ויציב הם צמד סתירות בפני עצמן.אם יש חריגה (overshoot), הכוח המדויק במקום חסר משמעות.
במיוחד בתהליך הציוד המדויק של הרכבה בלחץ, חלקים שבירים ובעלות גבוהה, בדרך כלל אסורה חריגה.
שליטה מלאה בכוח, תדר גבוה ומהירות גבוהה ללא חריגה?
איך TA עושה את זה?
עבור תרחישי יישום בעלי דיוק גבוה, שיטת "נחיתה רכה" מאומצת כדי לקחת בחשבון את הדרישות של מהירות גבוהה ודיוק גבוה, כלומר בקרת כוח מפולח.המפעיל מתקרב במהירות לחומר העבודה דרך מצב תנועת המיקום, עובר במהירות למצב בקרת הכוח במיקום בו הוא עומד ליצור קשר עם חומר העבודה, ומגדיל בהדרגה את הפלט עד שהוא מגיע לערך שנקבע מראש.מצב מיקום + מצב בקרת כוח + זמן ייצוב כוח, הזמן הכולל בשימוש הוא יעילות הביצוע הבודדת של המפעיל.
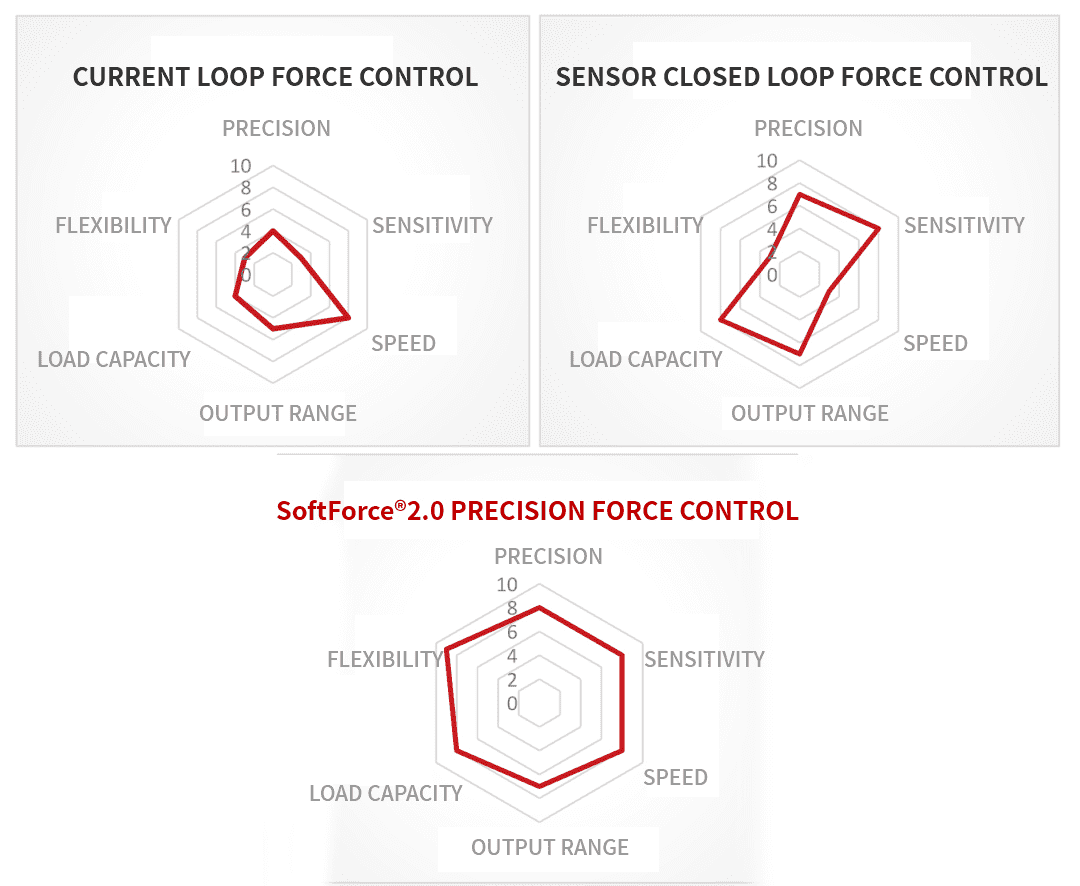
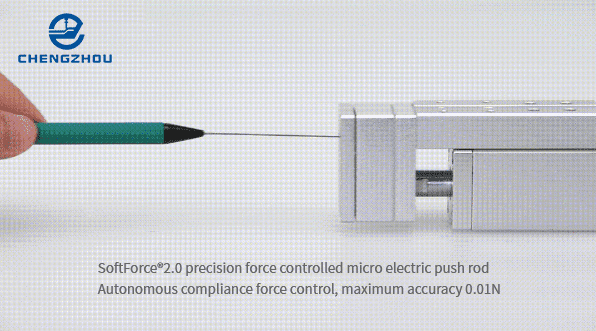
בשילוב עם חיישן כוח במהירות גבוהה ואלגוריתם בקרה חיזוי מבוסס דגם, מפעיל דיוק מבוקר כוח SoftForce®2.0 יכול לזהות אוטומטית את מיקום המפעיל ואת מצב המגע עם חלק העבודה, כך שהמפעיל, כסוף האוטומציה ציוד, יש אותו תפקיד כמו יד אדם.תפיסה מישוש, שליטה ומודיעין ביצוע.
באותו מרחק, טווח מהירות הנחיתה הרכה של "SoftForce ®2.0 Precision Force Control" גדל, הסובלנות גדולה יותר, והוא יכול אפילו להשיג בקרת כוח מלאה, מה שמשפר ישירות את מחזור הייצור ומפחית מאוד את עלות הניסיון וה אימות שגיאה.
▋תדירות עיבוד גבוהה להשגת ביצועים טובים יותר
מחזור החישוב של ערכת בקרת הכוח "חיישן כוח שישה צירים + רובוט" הנפוצה בשוק הוא 5-10 מילישניות, כלומר, תדר העיבוד הוא 100-200 הרץ.תדר העיבוד של מפעילים דיוק מבוקרי כוח SoftForce®2.0 יכול להגיע ל-4000 הרץ (כלומר 0.25 מילישניות), ודגמי סדרת התדרים הגבוהים יכולים להגיע ל-8000 הרץ, שהם פי 4-8 מתדירות העיבוד של מפעילים מבוקרים בכוח רובוטים כלליים.
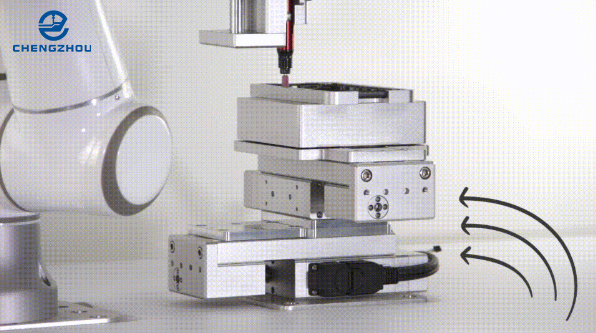
▋ בקרת כוח תואמת אקטיבית, שיכולה לעקוב אחר השינוי בכוח החיצוני
קצב תגובה יעיל ומשוב כוח מיידי מאפשרים למפעיל להגיב באופן מיידי לכוחות חיצוניים ולהשיג בקרת כוח תואמת אקטיבית.גם אם נתקלים בכוחות חיצוניים במהלך הפעולה, ניתן להתאים אותו בזמן, מה שהופך את התהליך לדייק יותר.הגנה טובה יותר על חלקי עבודה.
תדר גבוה ומהירות גבוהה ללא חריגה
גם בתנועה בתדירות גבוהה ובמהירות גבוהה, הוא עדיין שומר על דיוק תפוקה גבוה, ובו בזמן מבטיח "נחיתה רכה" ו"אין חריגה", מגע עם פני השטח של חלקים במהירות גבוהה, כוח קטן, ומבצע גמישות איסוף והנחת חלקים וכדומה, כדי למנוע נזק לחלקים עדינים ושבירים.רכיבים.
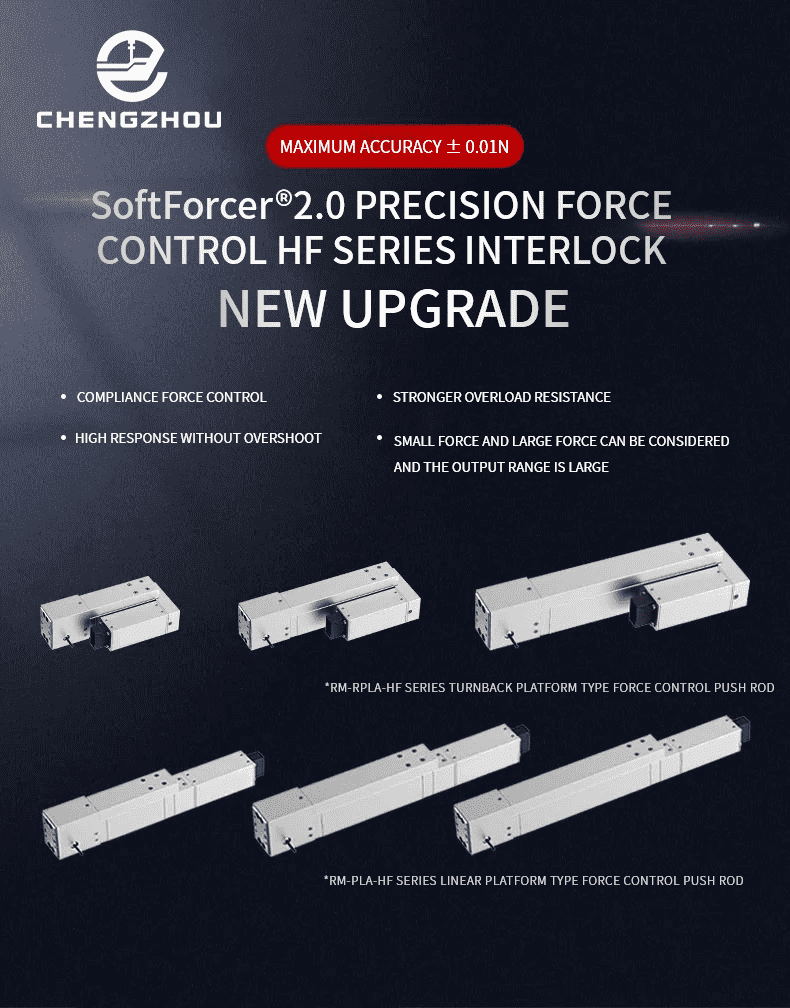
SoftForce®2.0 Precision Force Control
שדרוג חדש מסדרת HF
▋ יכולת חזקה יותר נגד עומס יתר
בהתבסס על ההבנה המעמיקה של התהליך באתר ואיטרציות מרובות, סדרת בקרת הכוח הדיוק HF SoftForce®2.0 של צ'נגג'ואו ששודרגה לאחרונה בפברואר השנה כוללת עיצוב חיישן משולב, ויכולת האנטי-עומס שלה גבוהה פי כמה מאשר ב- בעבר, עם עמידות גבוהה יותר וקלות שימוש.להתמודד עם תנאים מורכבים יותר.
▋יכול לקחת בחשבון גם כוח קטן וגם תפוקה גדולה
מצויד במערכת בקרת כוח SoftForce®2.0 בעלת דיוק גבוה, שולחן ההזזה ומוט הדחיפה הנשלט בכוח המדויק עם מהלך גדול ועומס גדול יכולים ליצור כוח קטן ומדויק תחת עומס גבוה, ויכולים גם לקחת בחשבון את הכוח באותו זמן. זמן, וטווח הפלט רחב יותר.גדול יותר, כלומר טווח דינמי כוח רחב יותר*.
*טווח דינמי כוח: היחס בין הכוח המקסימלי והמינימלי שניתן להפיק.
בקרת כוח מדויקת יכולה לשמש רק על ציר בודד
ניתן להשתמש במפעילים דיוק מבוקרי כוח של SoftForce®2.0 לא רק בציר בודד, אלא גם לספק אפשרויות רבות יותר לפתרונות הרכבה מרובה צירים.לדוגמה, ה-"RM Chengzhou 2D Synchronous Precision Force Control Platform Control System" העדכנית ביותר שהושקה על ידי Chengzhou Technology מורכבת משני מפעילים חשמליים דיוק בכוח Chengzhou, שיכולים להחליף את הכוח של ערכת הבקרה של "חיישן שישה צירים + רובוט". משמש לטחינה מדויקת ופיזור של המסגרת הפנימית של טלפונים ניידים וכו'.
Chengzhou 2D מערכת בקרת פלטפורמת בקרת כוח דיוק סינכרוני
(מצויד במערכת בקרת כוח ברמת דיוק גבוהה SoftForce®2.0)
שירותים מקצועיים מתוחכמים וקלים לשימוש
אלגוריתם בקרה מתקדם ותהליך איתור באגים פשוט מביאים חווית משתמש נוחה ללקוחות.אפילו מפעיל עם רקע נמוך יכול להתחיל תוך 5 דקות, באמת "חבר והפעל".
יחד עם זאת, צוות השירות הטכני לאחר המכירה המקצועי והחזק של Chengzhou Technology יכול לספק ללקוחות תמיכה טכנית בזמן, מקיף וללא דאגות בפעם הראשונה, בין אם זה ספקות טכניים, הוראה, פתרון בעיות או תחזוקה.
Chengzhou Technology תמיד הייתה אמיצה מספיק כדי להרחיב את גבולותיה.עם החוזק הטכני המוצק והחדשני שלה, היא השיקה ללא הרף מוצרי מפעילים חכמים יותר, מדויקים יותר ותואמים יותר באיכות גבוהה כדי לספק מוצרים מתקדמים לאריזה ובדיקות מוליכים למחצה, אוטומציה 3C, ייצור מדויק, תעשיות רפואיות חכמות ותעשיות אחרות.רכיבי ליבה כגון מערכות בקרת תנועה מדויקות ומפעילים.
זמן פרסום: 31 במאי 2022