ניתן לחלק את הגריפים למספר סוגים, כולל חשמלי ופנאומטי.אז מה ההבדל בין תפסנים חשמליים לאחזים פנאומטיים?
1: מהו תפסן תעשייתי?
תפסנים תעשייתיים ידועים גם כמנגנוני תפסן מכאניים.מנגנון תפס הרובוט מתוכנן בהתאם לדרישות העבודה בפועל ובעל צורות שונות.
תפסנים מכניים הם בדרך כלל תפסי שתי אצבעות, המתאפיינים בתכונות תנועה, אחיזה ומנגנון.לאחר מכן, בואו נדבר על כמה היבטים חשובים.האחד הוא מנגנון הידוק הקצה הפנאומטי, המאופיין במהירות פעולה מהירה מאוד, נזילות מגיעה מהמערכת ההידראולית, איבוד לחץ קטן יחסית, ומתאים לשליטה למרחקים ארוכים.השני הוא מנגנון הידוק קצה היניקה, המשתמש בכוח היניקה של כוס היניקה כדי להזיז את האובייקט.הוא מתאים בעיקר לחפצים בעלי עלייה מתונה ביחס ובעובי המראה, כמו זכוכית, רק נייר וכו'. האחד הוא מנגנון מהדק קצה הידראולי מהדק חפצים על ידי הידוק הידראולי ושחרור קפיץ.אבל, בסופו של יום, הטפרים של רובוטים תעשייתיים יכולים לעזור לנו לעשות את העבודה שלנו טוב יותר.
2. ההבדל בין תפסן חשמלי לתפסן פנאומטי
בהשוואה לאחזים פנאומטיים, ליישום של תפסנים חשמליים בתחום האוטומציה התעשייתית יש את המאפיינים הבאים:
1), לסוג המנוע החשמלי יש מנגנון נעילה עצמית, שיכול למנוע מציוד העבודה להיפגע כתוצאה מהפסקת חשמל.בהשוואה לאוחזים פניאומטיים, זה בטוח יותר;
2), לאוחן החשמלי יש פונקציית בקרה הניתנת לתכנות כדי להשיג מיקום רב נקודות.לאחזים פנאומטיים יש רק שני עצירות, בעוד שתפסים חשמליים יכולים לקבל יותר מ-256 עצירות.ניתן לשלוט בהאצה ובהאטה של האצבע החשמלית כדי למזער את ההשפעה על חומר העבודה.
3), התפסן החשמלי הוא תפס גמיש שיכול להשיג בקרת כוח מדויקת, בעוד שהתפסן הפנאומטי הוא תהליך נדנוד.באופן עקרוני, יש תנודה, שקשה לבטלה.ניתן לכוונן את כוח ההידוק של האוחז החשמלי כדי לממש בקרת כוח בלולאה סגורה.דיוק כוח ההידוק יכול להגיע ל-0.01N, ודיוק המדידה יכול להגיע ל-0.005 מ"מ.החוזק והמהירות של תפסנים פנאומטיים הם בעצם בלתי נשלטים, כך שלא ניתן להשתמש בהם לעבודה עדינה עם גמישות גבוהה.
4), נפח התפסן החשמלי קטן בהרבה מזה של התפסן הפנאומטי.זה גם מאוד נוח להתקנה.התחזוקה פשוטה.
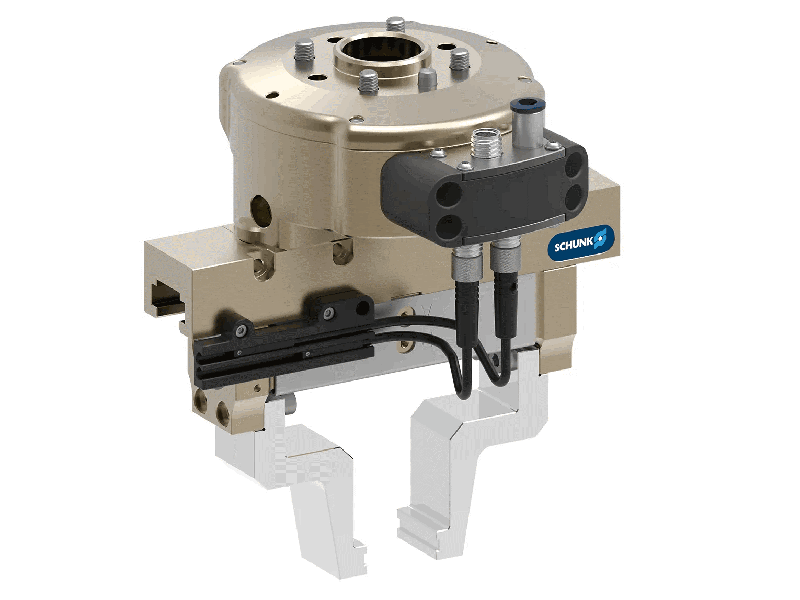
תפס פנאומטי
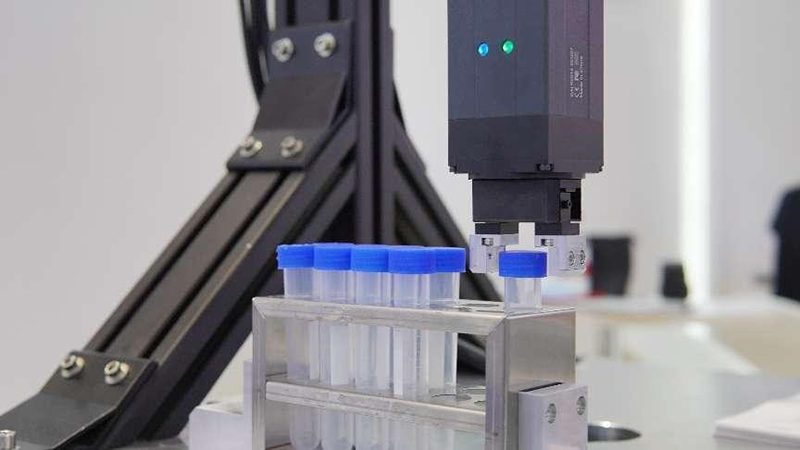 תפסן חשמלי
תפסן חשמלי
3. יתרונות תפסן חשמלי
1. שליטה במיקום הלסתות
ניתן לקבוע את מיקום הלסתות באמצעות מנוע מקודד וסכימת בקרה מתאימה.לעומת זאת, בלסתות מסורתיות, בדרך כלל יש צורך להחזיק את השבץ המלא.בעת שימוש באוחזים חשמליים, השתמש רק במרווח הדרוש קרוב לחלק ולאחר מכן צמצם את הנסיעה.מתגי חלקים מאפשרים בחירה של מגוון רחב יותר של גדלי חלקים מבלי לפגוע בזמני מחזור הייצור.
2. בקרת אחיזה ומהירות
מכיוון שזרם המנוע עומד ביחס ישר למומנט המופעל, ניתן לשלוט בכוח האחיזה המופעל.אותו דבר לגבי מהירות הסגירה.לדוגמה, זה עשוי לעזור עם חלקים שבירים.
זמן פרסום: 19 בדצמבר 2022